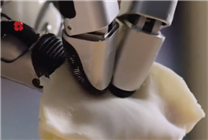
在北京台春晚的舞台上,一群机器人完成了“巧手包饺子”的公开表演。它们动作迅捷,捏合面皮时甚至能在饺皮上留下清晰可辨的指纹印痕。这背后是多个高自由度关节的精密协作。
表演并非简单的“炫技”。测试数据显示,目前机器人包饺子的成功率已远超早期实验室阶段。包饺子之所以被称为机器人技术的高难度挑战,在于需要同时攻克材料形变预测、多模态传感融合与实时运动规划等核心难题。
为实现这一目标,机器人配备了先进的传感系统。例如,机械臂采用的仿生触觉阵列传感器,能高密度分布压力感应单元,实时感知面皮延展时的细微应力变化。而睿尔曼的轮式折叠机器人则展示了更强的场景适应能力,它依靠高精度视觉定位系统与柔性夹爪,成功实现了对玻璃瓶等透明物体的稳定抓取,突破了该领域的一项长期难题。
更为关键的是认知层面的突破。幕后技术为机器人赋予了“中断记忆”能力。当执行任务被打断时,系统能自动保存面皮的形变参数,并在回来后无缝衔接。这种时空记忆技术让机器人首次具备了处理多线程家务任务的潜力,其底层架构已在开源社区引发关注。这场表演标志着机器人技术在灵巧操作与环境交互方面取得了显著进展。

